
OTT1842
Applications
Soft-robotic grippers, steerable catheters, and lab-on-chip microvalves.
Target Problems
Smart materials – materials that can change shape, stiffness, or movement in response to external stimuli such as electricity, heat, or pressure – are used in areas like robotics, medical devices, and advanced engineering. However, these materials usually produce only small changes, resulting in movement that is difficult to detect or utilize. This limitation is significant because many real-world applications require larger and more controlled deformation.
Solutions
UWM researchers have developed a metamaterial that changes shape in response to external stimuli, such as electric fields. The material is composed of many small, interconnected parts, each producing tiny movements that collectively generate a much larger overall deformation. This architecture enables the material to stretch, contract, and change its mechanical behavior more significantly than existing smart materials.
Key Benefits
-
-
- Generates significantly larger movement than current smart materials (15% strain)
- Enables real-time changes in material properties
- Provided scalable and customizable architecture for different applications
- Supports a wide range of system and device integrations
-
About this Technology
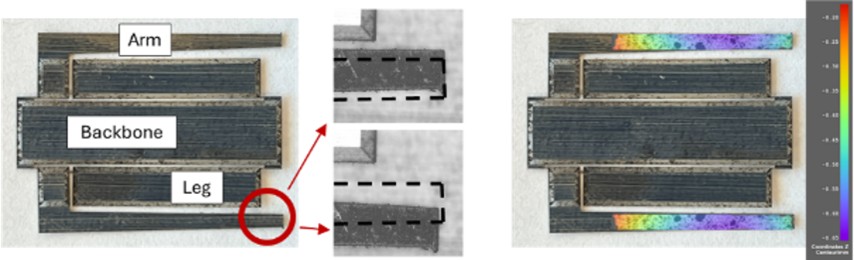
This technology is a metamaterial composed of an array of interconnected actuator elements. Each element is actuated via piezoelectric response, and the motion is mechanically amplified through a flexure hinge network that converts small displacement into large deformation. Through this design, the material can reversibly expand, contract, bend, and tune its stiffness or other properties in real time. This scalable architecture enables significant, controllable changes in material behavior that are not achievable with conventional smart materials.
Stage of Development
This technology is in a research and development stage with ongoing design and prototype fabrication of actuator components and small-scale systems.
Partnering Opportunity
We are looking for partner apps with robotics companies, biomedical device developers, lab-on-chip platform developers, and advanced materials or manufacturing organizations.
Intellectual Property (IP)
Patent pending. Protected and managed by the UWM Research Foundation.
Lead Inventors
Daniel J. Schlitz, UWM Research Scientist, Civil & Environmental Engineering
Rani Elhajjar, UWM Professor, Civil & Environmental Engineering